
 zhm-real
zhm-real
11 измененных файлов с 71 добавлено и 32 удалено
BIN
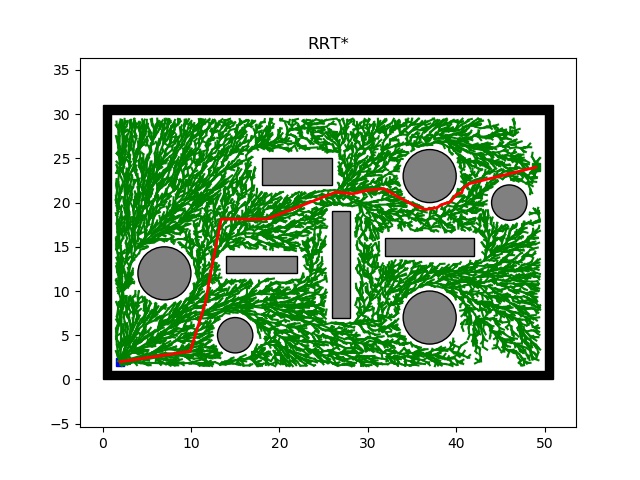
Sampling-based Planning/rrt_2D/RRT_star.jpeg
{kind=link}
BIN
Sampling-based Planning/rrt_2D/__pycache__/env.cpython-37.pyc
BIN
Sampling-based Planning/rrt_2D/__pycache__/plotting.cpython-37.pyc
BIN
Sampling-based Planning/rrt_2D/__pycache__/rrt.cpython-37.pyc
BIN
Sampling-based Planning/rrt_2D/__pycache__/utils.cpython-37.pyc
+ 9
- 14
Sampling-based Planning/rrt_2D/env.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 2
- 2
Sampling-based Planning/rrt_2D/plotting.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 3
- 3
Sampling-based Planning/rrt_2D/rrt.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 12
- 5
Sampling-based Planning/rrt_2D/rrt_star.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 14
- 0
Sampling-based Planning/rrt_2D/test.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 31
- 8
Sampling-based Planning/rrt_2D/utils.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||